Hallo,
ich plane im Zuge meines bevorstehenden Umzugs, auch den Staubsaugerroboter zu wechseln. Bislang hat bei mir ein Roomba 560 diesen Deinst verrichtet und mich auch insgesamt immer zufrieden gestellt. Allerdings dürfte dieser mit den 100qm der neuen Wohnung überfordert sein, außerdem halte ich das „chaotische“ Navigationsverhalten inkl. hässlicher „Lighthouses“ in jeder Tür für nicht mehr zeitgemäß. Es gibt mittlerweile besseres, nämlich nach allem was ich herausfinden konnte, beispielsweise den Vorwerk Kobold VR100. Dieser kostet dann auch eine Kleinigkeit mehr als mein alter Roomba, dafür navigiert das Gerät per Laser (eine Art rotierender Laser-Abstandssensor scannt quasi zweidimensional den Raum, und das soll nach einhelliger Meinung von Kunden, Testzeitschriften und natürlich von Vorwrk auch sehr gut funktionieren).
Hauptvorteil ist, dass dieses Gerät keine Lighthouses o.ä. benötigt, die jeweils Batterien brauchen und im Weg herumstehen.
Nun ist es wohl so, dass der Kobold auf der Plattform des Neato-Roboters basiert, dem man eine exzellente Navigation, aber eher mittelmäßige Saugleistung nachsagt. Hier hat dann Vorwerk wohl nachgebessert und insgesamt ist anscheinend ein brauchbares, zeitgemäßes Gerät entstanden. Ob das so ist, werde ich dann feststellen wenn ich das Gerät mal selbst ausprobiert habe. Ich werde die Tage noch mal einen Besuch im Vorwerk-Ladengeschäft hier in Hamburg abstatten und dann wohl den Kobold mitnehmen.
Den Roomba hatte ich natürlich damals standesgemäß per XBee an meine Automatisierung angebunden, was vor Allem wegen der so realisierbaren Funktion „Start bei Abwesenheit“ sehr attraktiv war. Das Leben von meiner Frau und mir verläuft eher nicht nach Zeitplänen, so dass eine reine Zeitplanung für uns nicht wirklich praktikabel ist, es sei denn man möchte dauernd so eine kleine Flunder zwischen den Füßen herumflitzen haben.
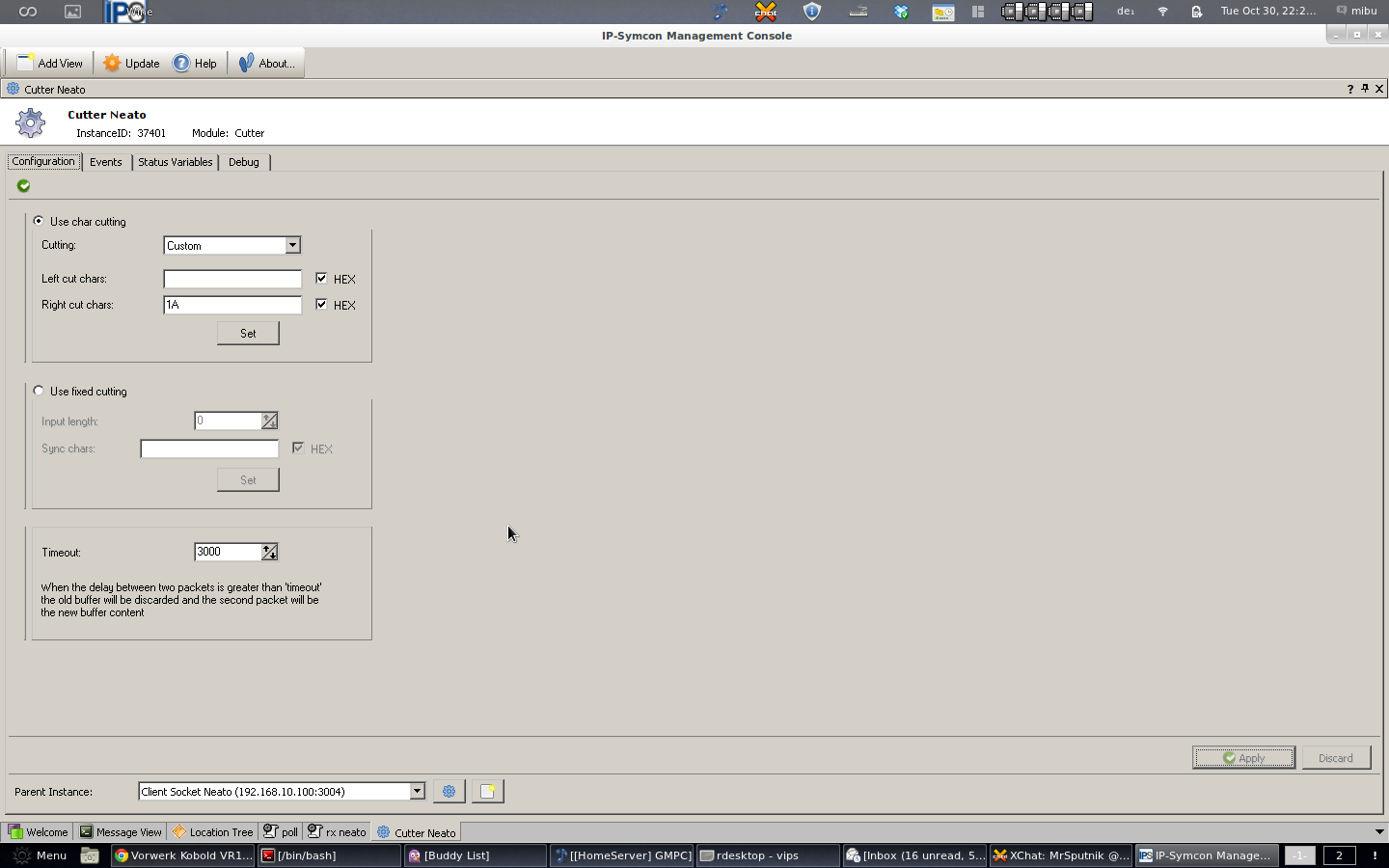
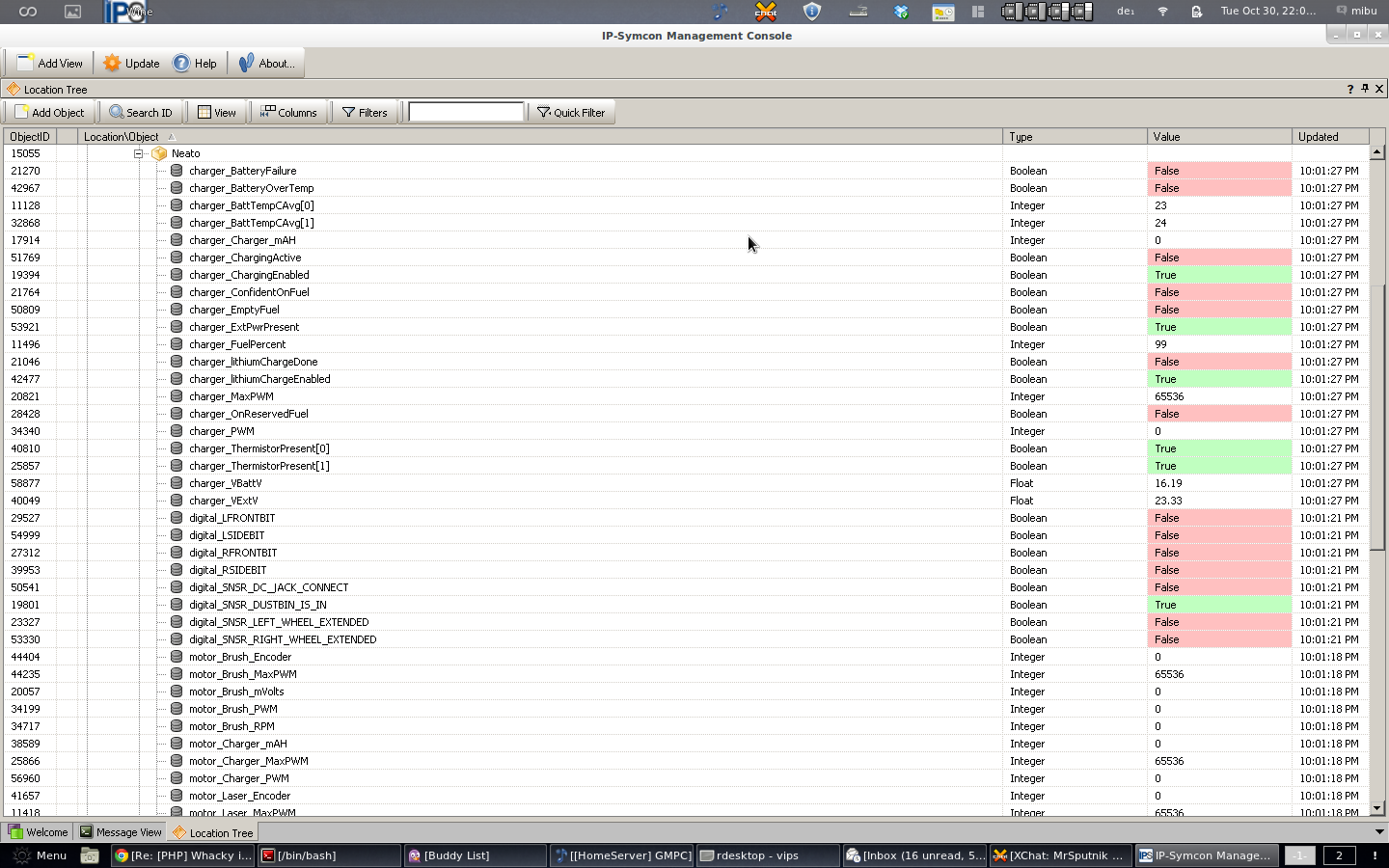
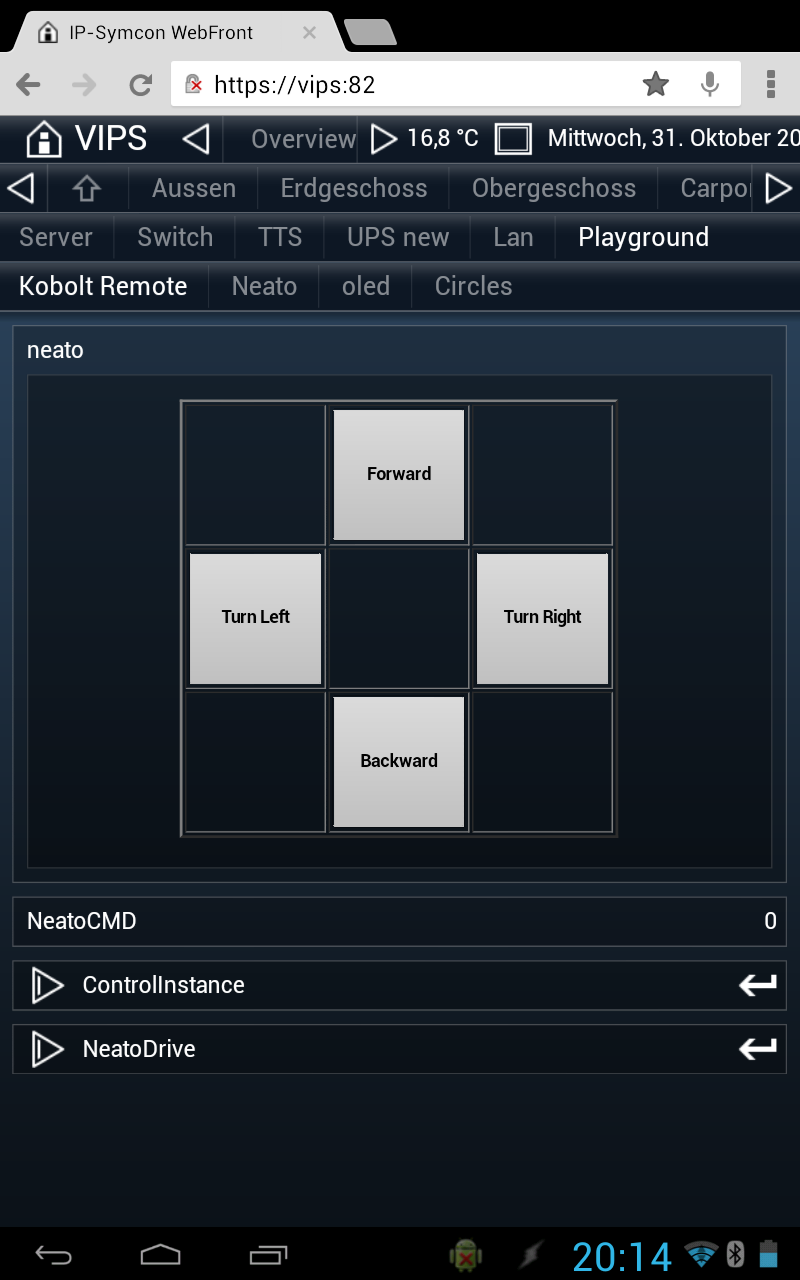
Den Kobold kann man offenbar auch mit dem PC steuern, denn er verfügt über eine USB-Schnittstelle. Zum Neato habe ich das hier gefunden, eine Art Befehlsreferenz. So wie es aussieht ist das Protokoll geradezu kinderleicht. Alles was man zum Testen braucht ist ein serielles Terminalprogramm und einen Treiber um die serielle Schnittstelle zu emulieren. Ich traue mir prinzipiell zu, meine Roomba-Anbindung auf den Kobold zu portieren, das scheint von der Programmierung nicht sonderlich kompliziert zu sein.
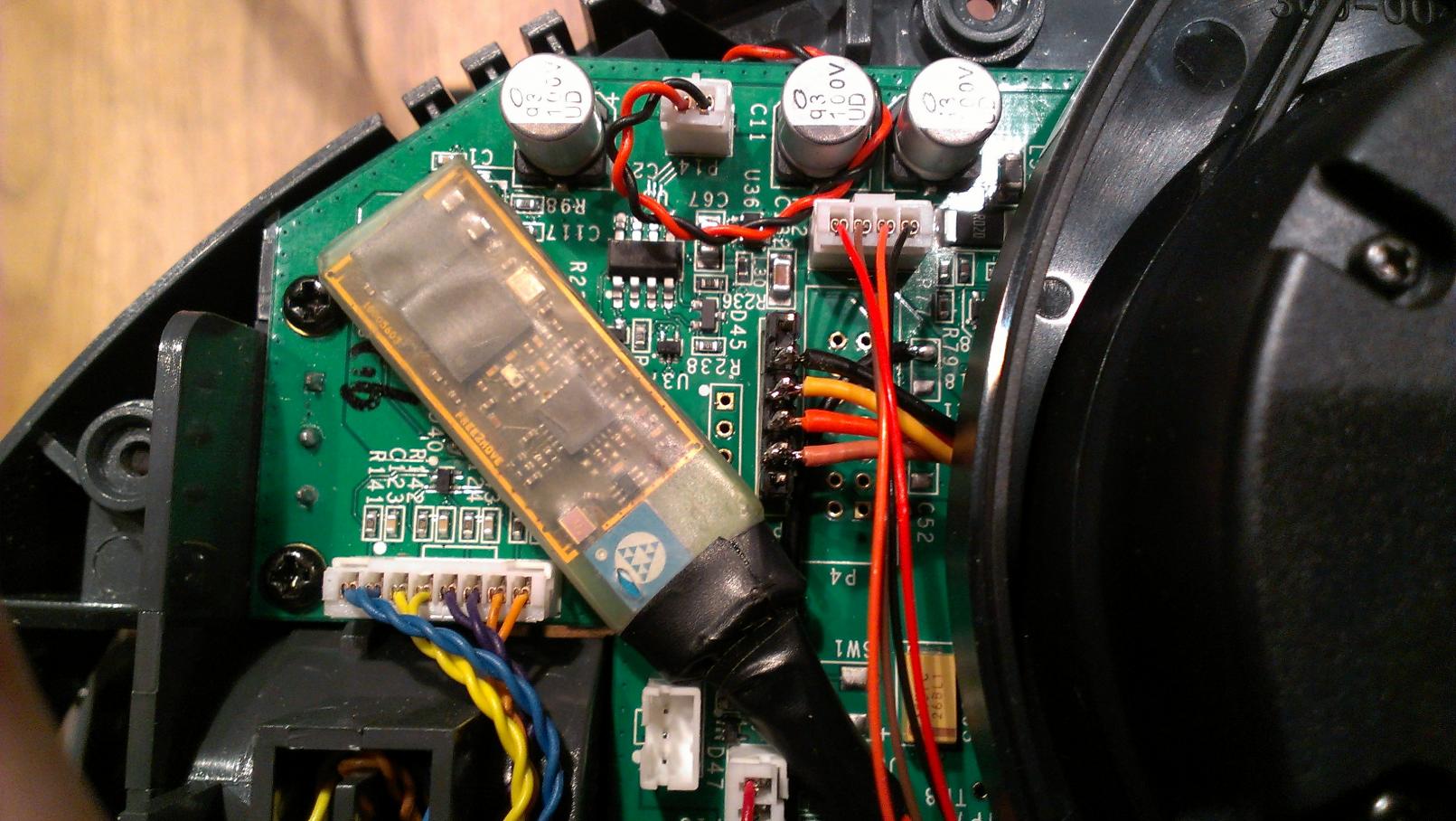
Was schon schwieriger ist, ist die Frage wie man es hinbekommt dass die Fernsteuerung drahtlos erfolgen kann. Man kann den Kobold ja schlecht mit USB-„Nabelschnur“ herumflitzen lassen. Möglicherweise gibt es intern eine ganz normale RS-232-Schnittstelle, die man irgendwo „anzapfen“ kann, so dass sich mit dem XBee arbeiten lässt. Dazu müsste man das Gerät dann aber wohl öffnen, und so erstmal schön die Garantie sausen lassen. Das fällt einem natürlich nicht so leicht bei einem teuren Neugerät.
Ansonsten gibt es wohl ein paar Lösungen für Wireless USB, denen aber in meiner Erfahrung nur eines gemein ist, nämlich dass sie bei allem was nicht Drucker oder Festplatte ist, ihren Dienst versagen.
Daher möchte ich das Thema als Bastelwilliger hier erst einmal in die Runde werfen, vielleicht fällt ja jemandem etwas gescheites ein. Für mich spricht erstmal nichts dagegen mir so ein Ding demnächst zu besorgen und es zur Not auch zu zerlegen, im Dienste der Erkenntnisfindung. Nur was interne Umbauten betrifft, würde ich mich überwinden müssen…
 ):
):